 |
| Product Tour | Brochure | More Information |
| |
| MicroPilot's new True Hardware-in-the-Loop (trueHWIL2) simulator offers UAV integrators and researchers the highest-fidelity UAV autopilot simulation available on the market today. |
| |
| Existing quasi-hardware-in-the-loop simulators approximate a UAV's flight by exchanging sensor and control surface position information with the autopilot over a serial port or CAN bus. This form of simulation introduces inaccuracies as an autopilot in flight reads this information directly from its sensors instead of a serial port or CAN bus. MicroPilot’s trueHWIL2 offers a dramatic improvement in simulator fidelity by electrically simulating all sensor outputs using an analog-to-digital converter, signal conditioning, and PWM interface boards. MicroPilot’s trueHWIL2 allows our customers to replicate the conditions their UAVs experience in flight, offering superior on-the-ground validation of autopilot setup and integration. |
| |
| TrueHWIL2 is available for: MP2128g2 | MP2128HELI-LRC2 | MP2128LRC2 | MP21283X |
| |
| |
| SYSTEM REQUIREMENTS |
| |
| The trueHWIL2 is a set of hardware and software components which provide environments for the true real-time simulation of flights of MicroPilot autopilots MP2128g2 and MP2x28g2. The simulator is an excellent tool for testing the MicroPilot autopilot in flight while the autopilot itself is sitting on the ground. The trueHWIL2 provides a safe testing environment for all UAV components and allows adjusting flight parameters and checking the integrity and functioning of on-board equipment and payload. The trueHWIL2 is also a flexible tool for designing new UAVs, allowing it to: |
| |
 |
|
| |
- build the models of different airframes, payloads, servos, on-board equipment and instruments
- provide interaction between the autopilot and simulated models or physical devices
- create unique flight conditions and scenarios for the autopilot or on-board equipment
|
| |
| |
| PROGRAMMING ENVIRONMENT |
| |
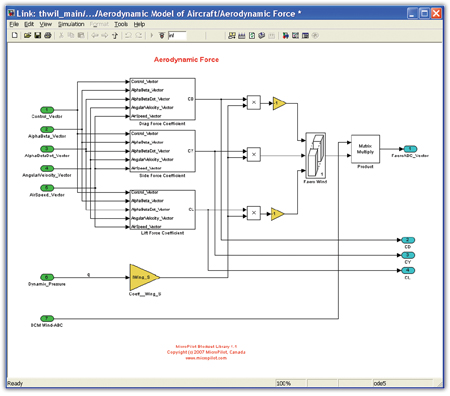
| The trueHWIL2 uses MathWork's MATLAB as a simulation and programming environment.* The model is built using Simulink and MATLAB high-level language programming. The model is then compiled and sent to the xPC Target computer with installed dedicated input/output hardware. This acquisition hardware is connected to the autopilot and reads its outputs and stimulates its inputs. Connections can also be made to other UAV hardware components to provide extended functionality of the simulator. The UAV flight can be controlled and monitored by HORIZONmp. The trueHWIL2 also provides 3-D visualization of flights using third-party products such as X-Plane. |
| |
*MATLAB is optional. You do not need it to simulate your UAV. The trueHWIL2 includes a pre-compiled MATLAB UAV simulation that allows our customers to access the power of the trueHWIL2 without the expense of purchasing MATLAB. The structure of the simulator is fixed, but parameters can be changed using the trueHWIL2 control center on a PC.
For those who want complete flexibility in their simulation or for those who already have MATLAB, MicroPilot provides a full MATLAB-based 6-DOF flight simulator for use as a basis of simulation. |
| |
The interface boards necessary to run the trueHWIL2 are:
National Instruments NI PCI-6602 Counter/Timer Device
National Instruments NI PCI-6703 Digital-to-Analog Converter (DAC)
The MATLAB components needed to build a simulation are:
MathWork's MATLAB, release R2010b+ (or later) with the following components:
Simulink
Control System Toolbox
Real-Time Workshop
xPC Target |

